
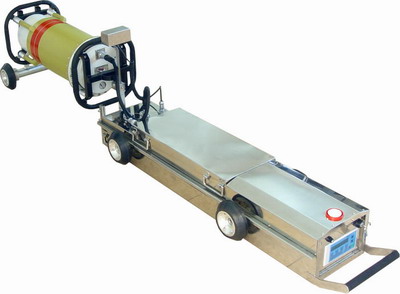





Проконтролированный передвижным рентгеновским аппаратом Crawler Crawlers 250Kv 17Ah Ndtpipeline трубопровода рентгеновского снимка PLC
Crawlers трубопровода рентгеновского снимка включают особенную часть которая может обнаружить сваривая линию длинного трубопровода. Crawlers трубопровода рентгеновского снимка имеют преимущества высокого радиографического качества, высокой отображая чувствительности, низкой интенсивности отказов и высокой эффективности работы. Crawlers трубопровода рентгеновского снимка имеют дифференциальный управлять и амортизаторы вибраций. Шасси crawlers трубопровода рентгеновского снимка можно двинуть в трубопровод устойчиво без нецентральных хода и переворачивать. Crawlers трубопровода рентгеновского снимка можно двинуть в трубопровод с большей эффективностью потому что она проконтролирована PLC с защитой ее от преграждать и под напряжением тока. Crawler трубопровода рентгеновского снимка легок быть отделенным в несколько частей и после этого положенным совместно, поэтому легко снести. Вы можете изменить параметр выдержки и сделать движение crawler трубопровода рентгеновского снимка, стоп и иметь выдержку с внешним контролируя источником. Crawlers трубопровода рентгеновского снимка легки для того чтобы работать.
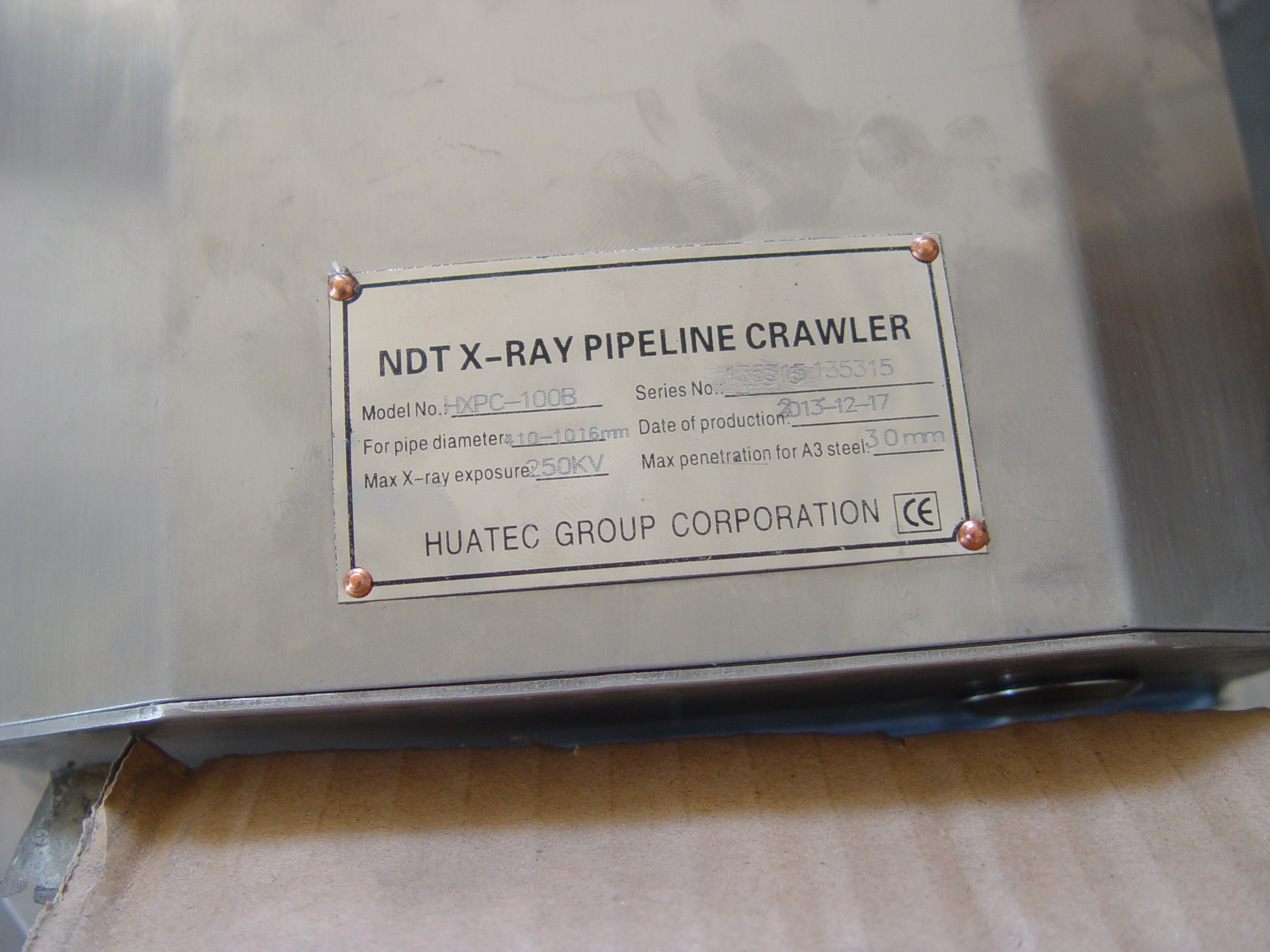
Спецификация x Crawler трубопровода Рэй
|
Модель
Спецификация |
HXPC-100A |
HXPC-100B |
HXPC-100C |
|
Диаметр трубы обнаруживая ряд |
Φ800-Φ1500mm |
Φ500-Φ1000mm |
Φ273-Φ700mm |
|
Полный вес |
140KG |
125KG |
100KG |
|
Длина Crawler |
2200mm |
2000mm |
2000mm |
|
Скорость проползать |
15M/min |
15M/min |
15M/min |
|
Расстояние проползать |
2KM |
2KM |
2KM |
|
Обнаруживать местонахождение ошибку |
±5mm |
±5mm |
±5mm |
|
Напряжение тока Max.output |
300Kv |
250Kv |
200Kv |
|
Max.outout настоящее |
3mA |
3mA |
3mA |
|
Взбираясь способность |
40° |
40° |
25° |
|
Угол радиации |
360°*35° |
360°*35° |
360°*35° |
|
Сила выхода |
1.5KW |
1.25KW |
1KW |
|
Batteryenergy |
22Ah/120V |
17Ah/120V |
12Ah/120V |
|
Сила мотора |
300W |
300W |
200W |
|
Выдержка |
1s~1h продолжает регулируемое |
1s~1hcontinues регулируемое |
1s~1hcontinues регулируемое |
|
Напряжение тока выдержки |
выбор 5 |
выбор 5 |
выбор 5 |
|
Температура деятельности |
-30°~ 70° |
-30°~ 70° |
-30°~ 70° |
Crawler включает под частями как стандарт аксессуары:
Главный корабль
Свинцовокислотная куча: 110V (22Ah)
Передвижной рентгеновский аппарат: 250KV/5mA
Удаленный регулятор (Electro тип магнитной индукции, никакой источник)
![]()
![]()












